



【摘要】:电动葫芦是用来提升或下降重物,并能在水平方向移动的起重运输机械。图3-16 电动葫芦的电气控制电路电动机M1为吊钩升降电动机,用来提升货物,由接触器KM1、KM2进行正反转控制,以实现吊钩升降。SB1、SB2为吊钩电动机M1的正反向复合起动按钮,正向接触器KM1、KM2线圈电路间采用复合按钮和接触器双重联锁。控制电路中设有限位开关SQ3、SQ4进行限位保护,防止电动葫芦移位时超出允许行程。
电动葫芦是用来提升或下降重物,并能在水平方向移动的起重运输机械。它具有起重量小、结构简单、操作方便等优点。一般电动葫芦只有一个恒定的运行速度,广泛应用于工矿企业中进行小型设备的安装、吊运和维修。电动葫芦的电气控制电路如图3-16所示。
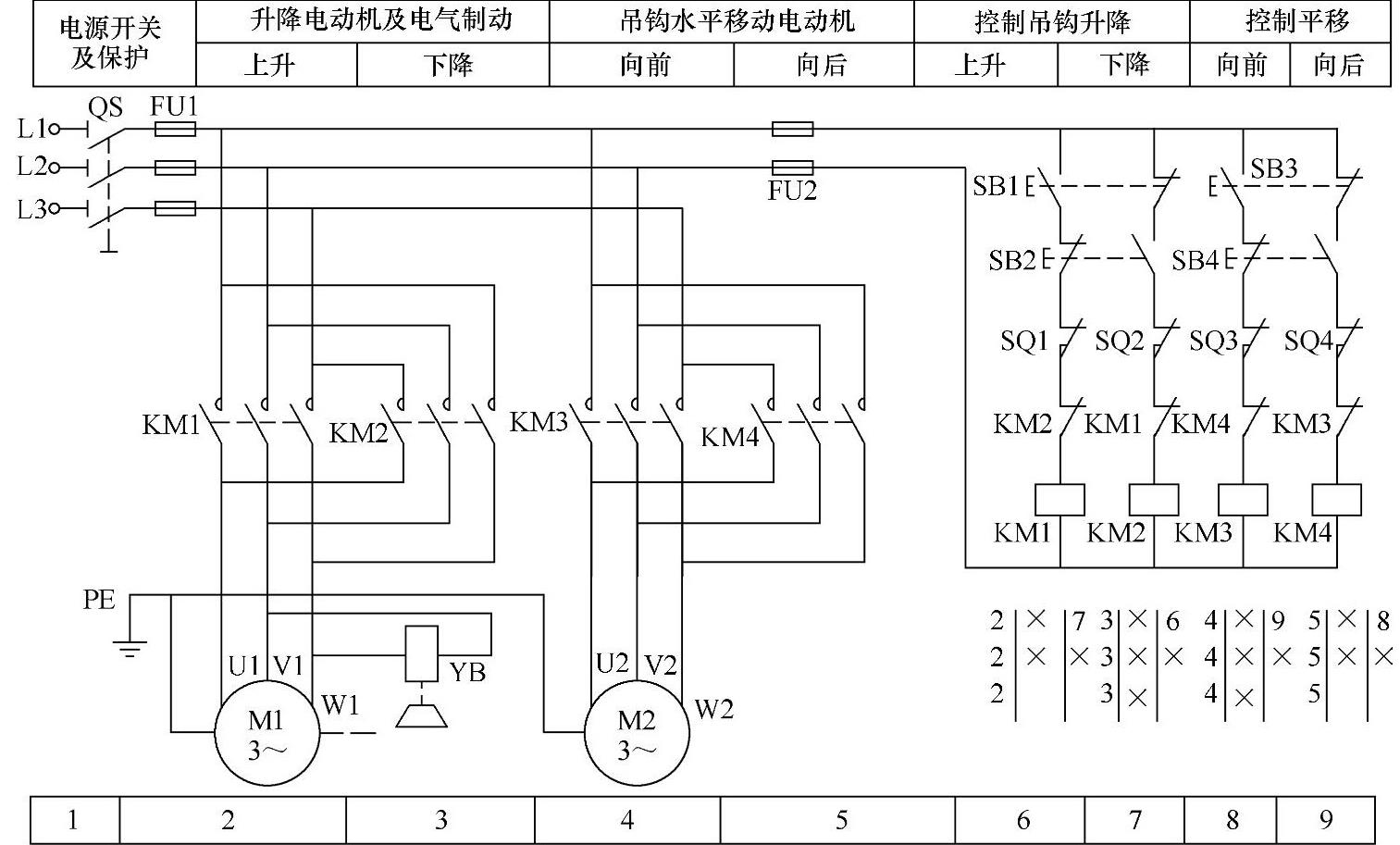
图3-16 电动葫芦的电气控制电路
电动机M1为吊钩升降电动机,用来提升货物,由接触器KM1、KM2进行正反转控制,以实现吊钩升降。YB为吊钩电动机M1的电磁制动器,它的线圈两端与电动机M1的两相电源线并联在一起,当M1得电时,YB也得电并松闸,让电动机M1转动;M1失电时,YB也失电,靠弹簧力将M1制动。(www.zuozong.com)
SB1、SB2为吊钩电动机M1的正反向复合起动按钮,正向接触器KM1、KM2线圈电路间采用复合按钮和接触器双重联锁。由于无自锁触头,因此松开按钮SB1或SB2,KM1或KM2就失电释放,电动机M1就停止转动。SQ1、SQ2为上下限位行程开关。
M2为移动机构电动机,用来水平移动货物,由接触器KM3、KM4进行正反转控制,采用复合按钮和接触器双重联锁,实现电动机M2的水平移动,M2停止时不需要电磁制动。控制电路中设有限位开关SQ3、SQ4进行限位保护,防止电动葫芦移位时超出允许行程。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。